微机保护单元
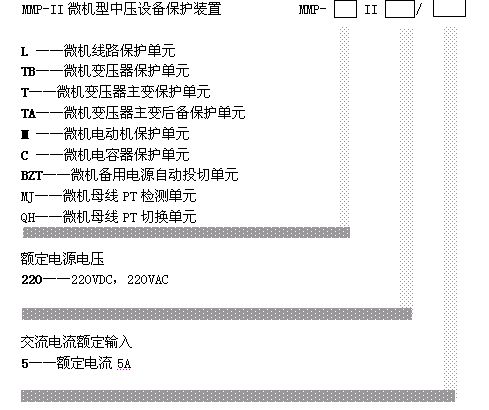
一、MMP-II系列微机保护装置概述
1.引言
MMP-II系列微机保护装置适用于110kV及以下电压等级的保护、监控及测量,可用于线路、变压器、电容器、电动机、母线PT监测、备用电源自投等回路及主设备的保护、控制与监视。单元化的设计使其不但能方便地配备于一次设备(如:高压开关柜等),也可以集中组屏、集中控制。规范的现场总线接口支持多个节点协同工作,实现系统级管理和综合信息共享。
装置结构采用半插件后插拔方式,分为总线电源板、CPU插件、交流插件及液晶驱动板,硬件设计的简洁使结构更加紧凑、小型化,插件式的灵活结构使生产、维护更加简单;装置整体嵌入式安装,开关量输入、继电器输出及通讯接线端子可插拔,给用户接线带来了极大的方便。
从模拟量的采样到继电器跳闸,保护装置使用全数字处理。保护及测量过程中数字技术的广泛应用有效地抑制开合电流(冲击电流)、高频瞬态过程、瞬态DC电流分量和CT饱和度变化的影响。
2.特点:
・ 硬件设计简洁精练、标准统一,后插拔的结构设计,方便了现场安装调试;不同类型的保护单元只是采用不同的软件组态,保护功能稳定可靠;保护类型齐全、统一。
・ 采用新型抗干扰器件,良好的抗震、抗干扰设计使装置在恶劣的环境中仍可正常工作。
・ 开关量输入为DC220V电压等级,增强了开关量输入的抗干扰能力。
・ 完善的自检功能,使运行管理人员对装置的工作情况能准确地把握。
・ 掉电保持功能可使数据更加安全。
・ 良好的大屏幕用户界面,图文并茂、内容丰富,全面反映运行状况,操作简单。
・ 实时波形及棒图的显示,增强了模拟量输入信号的信息量。
・ 采用可编程器件,支持在线编程,能更好的满足用户的要求。
・ 元件级、工程级、现场用户级的三级可编程方式,使程序组态更加灵活。
・ 采用矢量化的测量、保护算法,增强的滤波程序,不但可以提高精度,而且能更加有效的抑制干扰,更容易实现各种监测、保护功能。
・ 采用数字电位器调整测量精度,避免了由于电位器温漂带来的测量误差,大大提高了装置的稳定性、可靠性。
・ 参数的整定及保护功能软压板投退可在远方设定调整。
・ 保护电流整定值范围为3~99.9A,动作值可达3%精度,频率测量精度可达0.02Hz,四条反时限
保护功能符合IEC标准,动作时间误差不超过±5%或±50ms
・ 故障录波功能为故障情况下对系统进行分析提供了方便。
・ 通讯端口硬件采用平衡两线制RS485标准接口,软件协议符合IEC870-5-103,并可支持多种协议及Can总线接口,通信协议的标准化,可以方便的与各类设备联网。
・ 报警、保护出口可编程,使保护方式更加灵活。
・ 具有防跳功能,使继电保护系统设计更加完善
二、人机界面
1.特点
・ LCD显示器可以图形方式显示一次主接线图,也可以图形(汉字提示)方式显示主菜单、子菜单、保护信息、故障录波;LCD显示器的亮度也可由面板上电位器进行调节;为延长LCD寿命,装置设计了可编程的屏幕保护功能。
・ LED显示具有运行、断路器、报警、故障等状态指示。
・ 测量包括:
三相电流、三相电压、接地电流或残压、频率、计量脉冲电度等直接测量值。
三相线电压、接地电流或残压、负序电流、负序电压、有功功率、无功功率、功率因数、有功和无功电度等计算值。
・ 保护功能可根据需要组态,数量仅受MCU容量限制。
・ LCD可显示最后32个事件记录,这些事件记录包含有事件的名称极其附加信息,如时间、日期、电压有效值、电流有效值等,而且掉电不丢失。
・ LCD可显示开关量输入的状态及模拟量的输入波形和棒图。
・ 故障录波可记录所选通道的电流或电压波形,记录时间由故障前的时间和故障后的时间组成,故障记录的时间与所选录波通道数有关。
・ 实时时钟的时间、日期可由时间菜单设定,也可由变电站自动化系统或GPS来同步校时,内部电池可保证电源消失,时钟继续工作。
2.菜单
菜单采用Windows界面风格,有一次系统图,共有十个子菜单,依次为:调试,功率,时间,数值,告警,事件,设定,周波,录波,电度等,详细的操作方法请参考装置的使用说明书。
三、装置功能
1.模拟量输入
・ 采用高精度、动态范围宽的互感器,提高了信号测量的精度和可靠性
・ 可提供12路电压、电流模拟量输入
・ 测量精度0.5级,保护精度3.0%
・ 电流保护范围3~99.9A,电压保护范围1~100V
2.开关量输入
・ 10路开关量输入
・ 外接DC220V电源,提高了装置开关量输入的抗干扰能力
・ 可接受2路脉冲计数信号,使电度符合计量标准
3.继电器输出
・ 跳闸、合闸出口各一路
・ 低压侧跳闸出口一路(变压器)
・ 装置故障信号出口一路
・ 报警出口四路,可自行定义
4.监视和自诊断
装置中的硬件和软件被连续的自监视,保证了装置的高可靠性,并减少了对常规检验的需要。
监视和自诊断范围:
・ 回路/设备主要工况
・ AT(CT)、VT(PT)断线告警信号
・ 控制回路断线告警信号
・ 装置内部异常(数据、定值、存贮部件、端口等)告警信号
5.事件和故障记录
始终显示最近32个事件记录,如果产生新的故障,则将覆盖最早的故障,记录能详细地描述电力系统的故障以及保护装置的反应情况。
事件记录详情包括:
・ 记录故障跳闸、开关变位、外部操作
・ 时间、事件值和事件类型
・ 分辨率1ms,失电保持,记录32组。
表-1 事件记录(SOE)
|
记录类型 |
故障,越限,开关(逻辑量)变位,外部跳合,设定修改 |
|
记录事件数 |
32 |
掉电保持 |
|
记录内容 |
时标,事件类型,事件值 |
|
时间分辨率 |
1 mS |
|
|
事件记录查询方式 |
远方 |
通信召唤 |
|
就地 |
图形式LCD显示器 |
6.通信
采用平衡两线制RS485通信,通过标准规约IEC-60870-5-103与我公司SCADA系统或第三方的系统进行联网运行,实现所有信息的访问。
・ 远方监视
・ 遥控
・ 保护参数的远方设定
・ 远方测量
・ SOE事件记录
・ 开关设备的监测
・ 故障录波分析
四、保护功能
1.保护功能组态
MMP-Ⅱ系列微机保护装置的软件采用模块化的设计方法,软件模块间可自由组态。
例如:电流主元件“I”与过量子元件“>”组合则构成了过电流保护元件“I>”,以下给出了模块间可能的组态方式。
表-2 功能组态表
|
子元件
主元件 |
-- |
> |
< |
\I@0 |
\I@1 |
\I@2 |
_/ |
|
I |
|
I> |
|
I\I@0 |
I\I@1 |
I\I@2 |
|
|
Ix |
|
Ix> |
|
Ix\I@0 |
Ix\I@1 |
Ix\I@2 |
|
|
I+kI2 |
|
|
|
|
|
I+kI2\I@2 |
|
|
_/-I |
|
_/-I> |
|
|
|
|
|
|
I0 |
|
I0> |
|
|
|
|
|
|
I2 |
|
I2> |
|
|
|
|
|
|
U2> I |
|
U2> I> |
|
|
|
|
|
|
I--> |
I-->> |
|
|
|
|
|
|
|
Ijs |
|
Ijs> |
|
|
|
|
|
|
I-Is |
|
I-Is> |
|
|
|
|
|
|
I-I |
|
|
|
|
|
|
I-I_/ |
|
U |
|
U> |
U< |
|
|
|
|
|
U2 |
|
U2> |
|
|
|
|
|
|
U0 |
|
U0> |
|
|
|
|
|
|
Ux |
|
Ux> |
|
|
|
|
|
|
F |
|
|
F< |
|
|
|
|
|
Ch-H |
Ch-H-- |
|
|
|
|
|
|
2.保护功能配置
MMP-Ⅱ系列微机保护装置中每种类型的单元都可以实现表-10中所有的保护功能,其组态数量仅仅受MCU性能的限制。鉴于大多数用户的要求以及我公司多年的实践经验,如用户无特殊要求,则各种保护单元将以缺省功能配置(表-3)。
表-3 MMP-II系列微机保护装置缺省功能配置表
|
装置类型
功能 |
LⅡ |
MⅡ |
TⅡ |
TAⅡ |
TBⅡ |
CⅡ |
BZTⅡ |
QHII |
MJⅡ |
符号 |
|
|
・■ |
・■ |
|
・■ |
・■ |
・■ |
|
|
|
I> |
|
Ⅱ段过电流保护 |
・■ |
・■ |
|
・■ |
・■ |
・ |
|
|
|
I> |
|
Ⅲ段过电流保护 |
・■ |
|
|
・■ |
・■ |
・■ |
|
|
|
I> |
|
功率方向过电流保护 |
・ |
|
|
|
|
|
|
|
|
I-->> |
|
一般反时限电流保护 |
・ |
|
|
・ |
|
・ |
|
|
|
I\I@0 |
|
非常反时限电流保护 |
・ |
・■ |
|
・■ |
・■ |
・■ |
|
|
|
I\I@1 |
|
极端反时限电流保护 |
・ |
|
|
・ |
・ |
・ |
|
|
|
I\I@2 |
|
加速段保护 |
・■ |
|
|
|
|
|
|
|
|
Ijs> |
|
零序电流保护 |
・■ |
・■ |
|
・■ |
|
・■ |
|
|
|
I0> |
|
一般反时限零序电流保护 |
|
|
|
・ |
・ |
|
|
|
|
Ix\I@0 |
|
非常反时限零序电流保护 |
|
|
|
・ |
・ |
|
|
|
|
Ix\I@1 |
|
极端反时限零序电流保护 |
|
|
|
|
|
|
|
|
|
Ix\I@2 |
|
低周减载 |
・■ |
|
|
|
|
|
|
|
|
F< |
|
三相一次重合闸 |
・■ |
|
|
|
|
|
|
|
|
Ch-H-- |
|
定时限电流保护(MII专用) |
|
・■ |
|
|
|
|
|
|
|
_/-I> |
|
过热保护 |
|
・■ |
|
|
|
|
|
|
|
I+kI2\I@2 |
|
负序电流保护 |
|
・■ |
|
|
|
・ |
|
|
|
I2> |
|
差动速断保护 |
|
・ |
・■ |
|
|
|
|
|
|
I-Is> |
|
低电压保护 |
|
・■ |
|
|
|
・■ |
|
|
・■ |
U< |
|
二次谐波及比率差动保护 |
|
|
・■ |
|
|
|
|
|
|
I-I_/ |
|
瓦斯、温度 |
|
|
・■ |
|
|
|
|
|
|
|
|
复合电压启动过电流保护 |
|
|
|
・■ |
・■ |
|
|
|
|
U2> I> |
|
比率制动差动保护 |
|
・ |
|
|
|
|
|
|
|
I-I_/ |
|
过压保护 |
|
・ |
|
|
|
・■ |
|
|
・■ |
Ux> |
|
不平衡电压保护 |
|
|
|
|
|
・■ |
|
|
|
U2> |
|
备自投主备方式 |
|
|
|
|
|
|
・■ |
|
|
|
|
备自投互备方式 |
|
|
|
|
|
|
・■ |
|
|
|
注:“・”为保护单元可能的配置,“■”为出厂缺省配置
3.功能列表
保护元件的设定受用户密码限制,密码由用户设定及管理,只有输入的密码正确后,才允许对保护参数进行修改,各保护元件参数如表-4所示。
表-4 保护元件参数
|
Ⅰ段过电流保护 |
I>ID |
|
电流值设定
步长
动作时间
误差 |
3.0……99.9
0.1
<35
≤±3% |
A
A
mS
×整定值 |
|
Ⅱ段过电流保护 |
I>ID t>tD |
|
电流值设定
步长
时限设定
步长
误差
电流值
时限
返回系数 |
3.0……99.9
0.1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
×整定值
×整定值
|
|
Ⅲ段过电流保护 |
I>ID t>tD |
|
电流值设定
步长
时限设定
步长
误差
电流值
时限
返回系数 |
3.0……99.9
0.1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
×整定值
×整定值
|
|
带方向的三段式过流保护 |
I>ID t>tD |
|
电流值设定
步长
时限设定
步长
误差
电流值
时限
返回系数 |
3.0……99.9
0.1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
×整定值
×整定值
|
|
加速段保护 |
I>ID t>tD |
|
电流值设定
步长
时限设定
步长
误差
电流值
时限
返回系数 |
3……99.9
0.1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
×整定值
×整定值
|
|
启动过程定时限过电流保护 |
I>ID t>tD |
|
电流值设定
步长
时限设定
步长
启动时间设定
步长
启动电流倍数设定
误差
电流值
时限
返回系数 |
3……99.9
0.1
0.1……59.9
0.1
0.1……59.9
0.1
1……19
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
S
S
×整定值
×整定值
|
|
反时限过电流保护 |
一般反时限 t=0.14τ/[(I/Ie)0.02-1]
非常反时限 t=13.5τ/[(I/Ie)-1]
极端反时限 t=80τ/[(I/Ie)2-1] |
|
电流值设定
步长
时间常数设定
步长
动作时限误差
返回系数 |
3……10
0.1
0.1……3.2
0.1
≤±5%或±50ms
0.95 |
A
A
S
|
|
复合电压启动过电流保护 |
|
|
电流值设定
步长
时限设定
步长
负序电压设定
步长
低电压设定
步长
误差
电流值
时限
返回系数 |
3.0……99.9
0.1
0.1……59.9
0.1
3.0……20
1
5.0……60
1
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
V
V
V
V×整定值
×整定值
|
|
零序电流保护 |
I0>ID t>tD |
|
电流值设定
步长
时限设定
步长
误差
电流值
时限
返回系数 |
0.05……1.0
0.01
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
×整定值
×整定值
|
|
反时限零序电流保护 |
一般反时限 t=0.14τ/[(I/Ie)0.02-1]
非常反时限 t=13.5τ/[(I/Ie)-1]
极端反时限 t=80τ/[(I/Ie)2-1] |
|
电流值设定
步长
时间常数设定
步长
动作时限误差
返回系数 |
3……10
0.1
0.1……3.2
0.1
≤±5%或±50ms
0.95 |
A
A
S
|
|
负序电流保护 |
I2>ID t>tD |
|
电流值设定
步长
时限设定
步长
误差
电流值
时限
返回系数 |
0.5……99.9
0.1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
A
A
S
S
×整定值
×整定值
|
|
低周减载 |
FD t>tD |
|
频率值设定
步长
时限设定
步长
低电压设定
步长
滑差设定
步长
误差
频率值
时限
返回系数 |
45.0……49.9
0.1
0.1……59.9
0.1
5.0……60
1.0
1.0……10.0
0.1
≤0.02
≤±(1%+35ms)
0.95 |
Hz
Hz
S
S
V
V
HZ/S
HZ/S
HZ
×整定值
|
|
三相一次重合闸 |
t>tD |
|
无压设定
步长
时限设定
步长
检同期检无压设定
步长
同期设定
步长
误差
时限
返回系数 |
5.0……60
1.0
0.5……10.0
0.1
1……3
1
0.01……1.00
0.01
≤±(1%+35ms)
0.95 |
V
V
S
S
×整定值
|
|
过电压保护 |
U>UD t>tD |
|
电压值设定
步长
时限设定
步长
误差
电压值
时限
返回系数 |
10.0……129
1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
V
V
S
S
×整定值
×整定值
|
|
欠电压保护 |
UD t>tD |
|
电压值设定
步长
时限设定
步长
误差
电压值
时限
返回系数 |
10.0……60
0.1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
V
V
S
S
×整定值
×整定值
|
|
不平衡电压保护 |
U2>UD t>tD |
|
电压值设定
步长
时限设定
步长
误差
电压值
时限
返回系数 |
10.0……129.9
0.1
0.1……59.9
0.1
≤±3%
≤±(1%+35ms)
0.95 |
V
V
S
S
×整定值
×整定值
|
|
差动速断保护 |
|Ii-Io |≥Icdsd |
|
电流值设定
步长
时限设定
步长
误差
电流值
时限
返回系数 |
3.0……99.9
0.1
0. 1……59.9
0.1
≤±5%
<35
0.95 |
A
A
S
S
×整定值
mS
|
|
二次谐波及比率制动差动保护 |
|IH-IL|≥ICDMIN
|IH-IL|≥Icdmin+K1(|(IH+IL)|/2-IZD)
|IH-IL|*K2>I2zd |
|
电流值设定
步长
误差
电流值
比例K1(比例制动系数)
比例K2(谐波制动系数)
时限
返回系数 |
3.0……99.9
0.1
≤±5%
≤±12%
≤±15%
<35
0.95 |
A
A
×整定值
×整定值
mS |
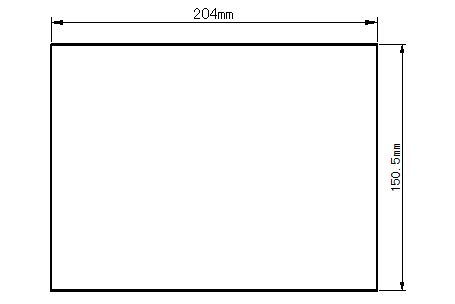
八、结构
表-7 机械结构
|
包装尺寸 |
190(H)/ 240(W)/ 280(D) mm |
|
装置尺寸 |
160(H)/ 220(W)/ 260(D) mm |
|
装置重量 |
约3.5kg |
|
壳体材料 |
铝合金 |
|
防护等级 |
IP5XD |
|
安装方式 |
嵌入式 |
|
开孔尺寸 |
204(W)×150.5(W)mm |
MMP-II系列微机保护单元开孔尺寸